Comparación de sistemas de comunicación inalámbrica para robots móviles
Leonardo E. Fields M.
Universidad Tecnológica de Panamá
[email protected]
Resumen: Los robots móviles ofrecen nuevas soluciones a problemas críticos y también cotidianos como búsqueda y rescate, exploración, mapeo, limpieza y transporte. En muchos de estos problemas es posible incrementar el impacto de los robots móviles si estos son capaces de comunicarse y realizar dichas tareas como un equipo, de forma coordinada. Este artículo provee una visión comparativa sobre algunos de los distintos sistemas de comunicación actuales que hacen posible la interacción entre robots móviles.
Palabras claves: comunicación inalámbrica, robótica.
Title: Comparison of Wireless Communication Systems for Mobile Robots.
Abstract: Mobile robots provide new solutions to critical and everyday problems such as search and rescue, exploration, mapping, cleaning and transportation. In many of these areas, it is possible to increase the impact of mobile robots if they are able to communicate and perform tasks as a team, in a coordinated manner. This article provides a comparative overview of some of the current communication systems that make possible the interaction among mobile robots.
Keywords: robotics, wireless communications.
Introducción
La comunicación entre robots móviles presenta un desafío a los sistemas de comunicación actuales. Debido a las limitantes que presenta la comunicación cableada en cuanto a la movilidad del robot y los recursos necesarios, la comunicación inalámbrica para estos casos se vuelve necesaria. Entre los sistemas de comunicación en esta línea se tienen:
Comunicación por radiofrecuencia
Comunicación ultrasónica
Comunicación láser
Cada uno de estos sistemas tiene bondades y limitantes propias de las características del canal, pero todos han demostrado su viabilidad en distintas situaciones. Independientemente del tipo de canal empleado se encuentran los paradigmas de comunicación, los cuales determinan la forma en que los robots utilizarán el canal para comunicarse entre sí. Algunos de estos paradigmas serán abordados durante el desarrollo de este artículo.
Los robots móviles requieren, para sus operaciones más típicas, comunicación en tiempo real, que se refiere a la transmisión de información con un margen de velocidad dentro de límites de tolerancia previamente establecidos. Algunos sistemas requieren que esta medida sea inferior a los nanosegundos, otros sistemas toleran incluso segundos.
2. Sistemas de comunicación
A continuación examinamos en detalle algunos de los sistemas de comunicación entre robots.
2.1 Comunicación por radiofrecuencia
La comunicación por ondas de radio es la más común en cuanto a tecnología inalámbrica se refiere. Para que este tipo de comunicación se dé, es necesario establecer algunas normas entre el emisor y el receptor tales como: la frecuencia de onda que se usará y el sistema de codificación/decodificación empleado para la conversión analógica/ digital. Actualmente, la banda de 2.4 GHz se utiliza comúnmente para sistemas locales de comunicación.
Un problema característico del canal de radio es la distancia que puede alcanzar una frecuencia. Los robots móviles son además especialmente vulnerables al costo energético de emitir una señal, ya que por lo general, estos disponen de una cantidad de energía muy limitada para sus operaciones.
Cuando se establece la comunicación, es necesario que los paquetes de información enviados (igual que en las redes de comunicación convencionales) tengan alguna forma de identificar al receptor designado, ya que la información que viaja por el canal está disponible para todos los que puedan recibirla. Para resolver este problema es posible implementar un sistema de encriptación que compartan el emisor y el receptor.
Además, el ruido en este tipo de canal es generado por interferencia electromagnética, la cual está constantemente presente en entornos urbanos. Para abordar el problema del ruido en este tipo de canales, existen actualmente muchos sistemas de codificación. En un sistema de comunicación unidireccional, donde un emisor controla uno o varios robots sin recibir ningún tipo de retroalimentación, es posible utilizar un sistema de codificación bloque-a-bloque, ya que la cantidad de mensajes distintos que necesita el robot para operar es muy baja. Pero si se desea comunicar a los robots entre sí, y que los mismos intercambien información compleja sobre su entorno, se requerirá otro tipo de codificación, ya que esto no admite márgenes de error como los tolerados por la codificación bloque-a-bloque.
Otro problema en este sistema de comunicación son los obstáculos físicos que tienden a atenuar el alcance de la señal enviada. Todos estos factores hacen que la diferencia entre los bits de datos recibidos y los bits de información contenidos sea considerablemente alta.
Podría pensarse en la comunicación por radio para robots móviles como el “peor caso” para las comunicaciones por radio. A pesar de todo, por la naturaleza del canal, se sabe que es posible lograr una comunicación fiable, aunque sea necesario sacrificar velocidad en la transmisión de la información, un retraso aceptable para la mayoría de los casos.
2.2 Comunicación ultrasónica
En algunas situaciones, la comunicación por radio puede volverse virtualmente imposible por cuestiones de seguridad o de interferencia. En estos casos es posible emplear la comunicación ultrasónica.
La necesidad de comunicación acústica surge en principio por la poca efectividad de las ondas electromagnéticas bajo el agua y por el hecho de que las ondas sonoras viajan más lejos y más rápido en ese medio.
En el aire, las ondas sonoras no viajan tan rápido ni tan lejos como bajo el agua, pero aún así es posible utilizarlas para transmitir información. Algunas investigaciones en esta línea sugieren que con equipos de bajo costo es posible alcanzar distancias de 25 metros [1]. Debido a sus similitudes con las comunicaciones por radio, podría ser útil aplicar algunos conceptos de codificación de canal establecidos por Shannon tales como el uso de señales antípodas y ortogonales para compensar el ruido acústico (el cual es virtualmente imposible ignorar). Algunas ventajas de este sistema son:
-La posibilidad de los sistemas modernos de identificar primero las propiedades del ruido ambiental tales como frecuencia, amplitud y textura; lo que le permitiría emitir señales que puedan diferenciarse fácilmente del ruido.
-La posibilidad de los sistemas de identificar patrones en una señal, lo cual también puede contribuir a aislar el ruido.
La comunicación acústica no es invulnerable a obstáculos físicos entre el emisor y el receptor, pero debido a que las ondas sonoras rebotan en la mayoría de las superficies, la comunicación es posible.
2.3 Comunicación láser
El rayo láser es un haz de fotones. A diferencia de otros haces de luz, el láser puede ser enfocado en puntos de tamaño muy reducido, lo que le permite conservar su intensidad a mayores distancias. Esta característica lo hace útil en comunicaciones. Actualmente la aplicación más prometedora del láser se encuentra en comunicaciones espaciales. Sin embargo, es posible utilizarlo en comunicaciones terrestres.
Un sistema de comunicación por láser requiere alinear manual o automáticamente al emisor y receptor, lo cual puede lograrse captando coordenadas con un GPS o visión artificial. Este sistema no está sujeto a las interferencias de las ondas sonoras ni electromagnéticas, pero existen otras fuentes de ruido que pueden afectarle tales como el aire caliente, lluvia, niebla, aves y otras fuentes de luz. Estos problemas pueden ser resueltos, en parte, con el uso de filtros, intensificando la potencia del láser e incrementando la redundancia en la señal. La mayoría de los sistemas de comunicación láser al aire libre operan en la banda de clase 3B (hasta 500 mW) [2]. Una de las posibles aproximaciones para transmitir datos binarios puede ser la siguiente: si el emisor no recibe luz, se interpreta como un cero; si recibe luz, es un 1. Pero este método resulta poco fiable si el ruido es provocado por lluvia o por un ave.
Otra forma de interpretar la señal puede estar sujeta a su intensidad y no a un estado apagado / encendido. En condiciones ideales, estos sistemas pueden alcanzar grandes velocidades lo que los hace útiles para transmitir audio y video, además de ofrecer mayor seguridad por la dificultad que presenta interceptar la señal.
2.4 Sistemas híbridos
Para hacer una red móvil de comunicación más eficiente se puede recurrir a combinar múltiples sistemas de comunicación. De forma similar a la que se construyen topologías de red para LAN, es posible asignar a los robots distintas tareas con el objetivo de mantener abierto un canal en todo momento. Algunos de los robots (nodos) de la red podrían dedicarse exclusivamente a servir de puente de comunicación con otros equipos de robots distantes usando distintos sistemas de comunicación dependiendo de las condiciones ambientales como se ilustra a continuación.

Figura 1. Los sistemas de comunicación híbridos para robots móviles les permiten a los mismos adaptarse a su entorno.
3 Redes Ad Hoc
Los equipos de robots móviles deben enfrentarse con frecuencia a un entorno desconocido, hostil y cambiante; con todo tipo de obstáculos (físicos y en los canales de comunicación). La comunicación centralizada y estática resulta ineficiente en estas circunstancias debido a la gran cantidad de energía necesaria para que cada robot pueda comunicarse con el nodo base. Adicionalmente, una falla en el nodo base podría deshabilitar toda la red.
Independientemente del tipo de canal empleado, las redes ad hoc podrían ayudar a resolver estos problema. En una red ad hoc para comunicaciones entre robots, ninguna unidad conoce la red completa, sino sólo a sus vecinos inmediatos, como puede observarse en la Figura 2. La información tendrá que pasar por varios nodos antes de llegar a su destino. Para transmitir información cada robot tendrá que actuar como un router y valerse de protocolos de enrutamiento dinámicos.
Figura 2. En las redes Ad Hoc, cada nodo sólo conoce a sus vecinos cercanos.
La información tendrá que pasar por varios nodos antes de llegar a su destino. Para transmitir información cada robot tendrá que actuar como un router y valerse de protocolos de enrutamiento dinámicos.
Para esta tarea algunos autores sugieren el uso de protocolos reactivos, los cuales actualizan las tablas de enrutamiento sólo cuando es necesario [3].
4 Ahorro de energía
Por las limitantes tecnológicas actuales, la energía de la cual dispone un robot móvil para su funcionamiento, el cual incluye traslación, comunicación y detección, es muy limitada. Esto hace necesario el desarrollo de protocolos “energéticamente sostenibles”.
Mantener abierto un canal de comunicación implica un consumo considerable de energía. Existen protocolos que buscan solucionar este problema tales como [3]:
PAMAS (Power-Aware Routing in Mobile Ad hoc networks).
TDMA (Time-Division Media Access).
5. Transmisión de energía
Los canales de comunicación también pueden ser usados para transmitir energía. La transmisión de energía entre robots móviles puede ayudar a resolver el serio problema que representa la energía limitada con la que cuentan los robots móviles para sus operaciones. Es posible, por ejemplo, utilizar un haz láser para transmitir energía a un receptor similar a una celda solar [4]. Utilizando la misma filosofía de las redes ad hoc, una red de robots móviles puede ser alimentada completa o parcialmente si se dispone de una fuente de energía abundante y preferiblemente móvil, y de emisores y receptores en cada nodo de la red, como se observa en la Figura 3.

Figura 3. Sistema de alimentación inalámbrica por láser usando una fuente.
Este método permitiría a los robots operar indefinidamente siempre que exista un camino entre la fuente de energía y el robot solicitante, que viaje a través de los nodos de la red.
Implementar un sistema de recepción y transmisión de energía en cada robot de la red puede volverse costoso. Otra solución al problema consiste en utilizar algunos robots como terminales que puedan transmitir y recibir energía, y al resto de los robots de la red sólo como receptores, como es el caso de la Figura 4.
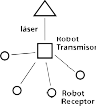
Figura 4. Sistema de alimentación inalámbrica por láser usando una fuente y un nodo transmisor.
Otro canal que posibilita la transmisión de energía son las microondas. Pero tanto éste como el láser tienen algunos inconvenientes tales como:
Absorción atmosférica.
Baja eficiencia en la conversión de energía lumínica a eléctrica.
Aún con estas desventajas, la posibilidad de transmitir datos y energía por el mismo canal abre un abanico de posibilidades para la supervivencia a largo plazo de las redes de robots móviles.
6. Inteligencia artificial y uso del canal
Controlar un robot a distancia es una operación que consume mucha energía y recursos, pues requiere de transmisión en tiempo real de los comandos y de retroalimentación por parte del robot. Es por eso que se busca que los robots sean lo más autónomos posibles. Líneas de investigación como visión artificial permiten a los robots distinguir objetos y planificar rutas mediante el uso de técnicas como las redes neuronales (para memorizar patrones en las imágenes).
Muchas aplicaciones con robots móviles requieren que los nodos hagan un recorrido de cierta zona geográfica, encuentren objetos, detecten obstáculos y busquen mejores rutas. Esta información permite a los nodos distribuir su trabajo y evitar redundancias. Transmitir esta información de forma eficiente es importante para evitar la sobrecarga del canal y un consumo innecesario de energía.
7. Conclusiones
En la comunicación por radiofrecuencia, las técnicas de transmisión y los sistemas de compresión y corrección de errores actuales hacen de este canal una opción viable en la mayoría de los casos.
La comunicación por láser se impone en comunicaciones a larga distancia y destaca por su velocidad de transmisión pero requiere de condiciones atmosféricas favorables y línea de visión directa entre emisor y receptor.
La comunicación ultrasónica es una alternativa eficiente y de bajo costo para reemplazar a la comunicación por radiofrecuencia donde la interferencia electromagnética impide usar este canal, o a la comunicación láser, donde una línea de visión directa no es posible. Sin embargo, la comunicación ultrasónica tiene poco alcance en el aire, su mayor aplicación se encuentra en comunicaciones subacuáticas.
Al usar cualquiera de estos sistemas se debe prestar atención a los protocolos de comunicación que se estarán usando dentro de la red, donde se hace necesario lograr un balance entre velocidad y ahorro de energía.
Las redes de robots móviles pueden valerse de estos y otros sistemas de comunicación, ya sea utilizando uno de ellos o combinándolos, para desplegar un equipo de trabajo coordinado capaz de realizar tareas eficientemente.
Existen aún muchos problemas por resolver en este campo, pero las posibilidades que ofrece han despertado un interés que está lejos de terminar.
Referencias
S. Justin, “Designing an Ultrasonic Modem for Robotic Communications”, US Army Research Laboratory, 2009.
K.K. Sharma, “Wireless Laser communication link using array sensor and GPS/ electronic compass based aligner”, CO2 Laser Division, Laser Science and Technology Center, Defence R&D Organisation, Metcalfe House, Delhi, India.
W. Zhigang, L. Lichuan and Z. MengChu, “Protocols and Applications of Ad-hoc Robot Wireless Communication Networks: An Overview”, International Journal of Intelligent Control and Systems, VOL. 10, No. 4, pag. 296-303, Dec. 2005.
Summerer Leopold, Oisin Purcell, “Concepts for wireless energy transmission via laser”, ESA –Advanced Concepts Team, The Netherlands, 2009.
G. Andrea, Wireless Communications, Stanford University, Cambridge University Press, 2005.
W. Alan, “Distributed Sensing and Data Collection via Broken Ad Hoc Wireless Connected Networks of Mobile Robots”, Intelligent Autonomous Systems (Engineering) Laboratory, University of the West of England Bristol.
B. Tucker and A. Ronald, “Communication in Reactive Multiagent Robotic Systems”, Mobile Robot Laboratory, College of Computing, Georgia Institute of Technology, Atlanta, 1994.