Sistemas de Señalización para el Control Automático de Sistemas Ferroviarios
Dra. Aránzazu de Caballero1
Dr. Rony Caballero George1
Dr. Humberto Álvarez1
Dr. Juan de Dios Sanz Bobi2
Dr. Ramón Galán López2
lng. Juan Andrés Brunei Vázquez2
Est. Krisly Guerra1
Est. Joel Flores1
Universidad Tecnológica de Panamá1
Universidad Politécnica de Madrid2
Resumen El presente artículo de divulgación tecnológica/científica tiene como propósito presentar, brevemente, las definiciones, características y esquemas más sobresalientes de la señalización ferroviaria. Esta interesante información resulta valiosa para tener una mejor comprensión sobre el tema del metro en Panamá.
Palabras claves: señalización ferroviaria, cantón, ATP, ATO, E.R.T.M.S., ATC, Driverless.
1. Introducción
El origen de la señalización ferroviaria es la consecuencia natural de la necesidad de incrementar el número de trenes circulando dentro de una línea ferroviaria con un nivel aceptable de regularidad sobre ella y la interacción segura entre trenes consecutivos. La evolución de la señalización ferroviaria inició con banderines de diversos colores que anunciaban o denegaban el paso a los trenes; luego, surge la señalización de tipo mecánica, la cual evoluciona a la señalización eléctrica con señales de luces laterales sobre la vía hasta encontrarnos en nuestros días con dinámicos sistemas electrónicos de información en línea que le indican al conductor ferroviario las acciones a ejecutar a través de las pantallas dentro de la cabina de conducción. De manera general, dentro del sector ferroviario se le denomina señalización a los distintos sistemas de control y protección de trenes, es decir ha sido la técnica de control y regulación del tráfico de trenes basada en semáforos (en ferrocarril, señales), los cuales indican a un conductor de un terminado convoy (grupo de vagones) si éste puede avanzar o no y bajo qué condiciones de velocidad [1].
2. Definiciones Relevantes
Bloqueo: acción de reservar un tramo de la vía, que permite que los trenes circulen con seguridad, de tal forma que no choquen ni se alcancen durante su marcha.
Itinerario: es la secuencia de señales autorizando un determinado trayecto del tren entre dos puntos.
Cantones: tramos de línea protegidos entre dos señales donde solo puede circular un tren.
Enclavamiento: es el corazón del control de los itinerarios y desvíos, asegurando, mediante tecnologías de seguridad, que la posición de las agujas y señales no entren en conflictos y que el tren este protegido durante el paso por los cruces contra una hipotética colisión con otro tren. Esta técnica se conoce también como la creación de itinerarios seguros.
3. Señalización Convencional
La señalización convencional se basa en un sistema de localización segura de cada tren, basada en el principio de que el tren cortocircuita a través de las ruedas y ejes un determinado circuito, dos de cuyos conductores son los propios carriles - véanse figuras 1 y2.
La señalización convencional comprende dos tipos de elementos fundamentales: los circuitos de vías y los enclavamientos.
Los circuitos de vías son los sistemas encargados de la detección de un tren sobre la vía, control del intervalo adecuado entre trenes sucesivos, apoyo a ciertos sistemas de ATP mediante la transmisión de la información relativa a las señales codificadas transmitidas por los raíles y, apoyo en la detección de fracturas de los carriles debido a la interrupción permanente del circuito eléctrico en corto de los dos carriles de un circuito o cantón. Existen varios tipos de circuitos de vías, siendo estos: circuitos de vías con juntas aislantes, sin juntas aislantes y aquellos de contadores de ejes. La Figura 1 presenta una sección de la vía ferroviaria comprendida entre dos juntas inductivas (cantón) que forma un circuito eléctrico, el cual se alimenta de la red de energía alterna, que en caso de cantón desocupado, provoca la excitación de un determinado relé asociado al cantón; la señal del estado del cantón se envía a las señales y los cuartos de enclavamientos.
La situación contraria se presenta en la Figura 2, cuando un tren ocupa dicho cantón, cortocircuita con el primer eje del tren (eje de acero de las primeras dos ruedas metálicas) al circuito y la corriente retorna por un camino con menor impedancia; esto implica la desexcitación del relé anterior y el cambio de sus contactos internos, así pasara la señal de luz verde a luz roja. Con el movimiento del tren sobre la vía, mediante el cortocircuito de los cantones sucesivos, va dejando una especie de rastro de señales en rojo tras de éste.
Las longitudes de los segmentos de los circuitos de vía (c.v.) varían de acuerdo al tipo de operación, sin embargo dichos tramos oscilan entre 40 m y 1000 m en trenes urbanos y en el caso de los ferrocarriles de largas distancias son de algunos kilómetros.
Todo el conjunto formado por los enclavamientos, relés de vía (electromecánicos o electrónicos), las regletas, y cableados correspondientes y los equipos electrónicos para el ATP y el ATO, los mandos de los motores de accionamiento de agujas y alimentación de la señalización están comprendidos en un espacio que se denomina cuarto de enclavamiento. El diseño de dicha instalación ferroviaria crítica debe realizarse con puertas con blindaje, sistemas electrónicos de control de entrada, condiciones de ventilación y humedad, debido a la gran responsabilidad que descansa en estos equipos ferroviarios y su personal y debido a las peligrosas implicaciones que tendría sobre la seguridad de los pasajeros en una red ferroviaria, el uso indebido de estos equipos, vandalismos, saqueos, entre otros incidentes delictivos.
Figura 1. Esquema de circuito desocupado. Elaboración propia con imagen del tren (Cortesía del CITEF: Dr. Sanz Bobi)
Figura 2. Esquema de circuito ocupado. Elaboración propia con imagen del tren (Cortesía del CITEF: Dr. Sanz Bobi)
De acuerdo a la Figura 3, los modos de conducción se clasifican de menor a mayor grado de automatización en: Operación Por Sef\ales, ATP (Automatic Train Protection), ATO (Automatic Train Operations), ERTMS ysistema Driverless (sin conductor).
Figura 3. Escalera de automatización de los modos de conducción.
3.1 Operación mediante señales
La operación mediante señales constituye el primer peldaño de la escalera de control del movimiento de trenes en un sistema de 1ransporte ferroviario yse utiliza igualmente en fallo delos sistemas ATP y ATO. Las líneas ferroviarias están divididas a efectos de sef\alización, en zonas controladas por equipos o sistemas denominados enclavamientos donde se centraliza el mando, el control y la supervisión de la zona; son una especie de cuartos de control por subzona ferroviaria. Las sef\ales suelen presentar tres aspectos:
Vía libre (verde): no existe ningún tren circulando enla ruta entre esa señal y la siguiente.
Anuncio de parada (amarilla): indica precaución con respecto a la siguiente señal del itinerario la cual está en rojo. En sistemas de lineas de metro esta señal no suele existir, debido a que las distancias interestación son bastante cortas.
Orden de parada (roja): paso no permitido. En el supuesto de que un tren esté ocupando el cantón que sigue a una señal, dicha señal estará siempre en rojo.
3.2 Conducción ATP
El sistema de protección automática ATP (en inglés Automatic Train Protection) actúa mediante señales codificadas recogidas por el tren cada cierto recorrido {normalmente al comenzar un circuito de vla), indicándole al tren la velocidad objetivo en el trayecto que comienza, hasta la recepción de la siguiente señal. Para no sobrepasar la velocidad máxima permitida, los trenes van dotados de una computadora abordo. Ésta necesita conocer: la longitud del tren, la curva de frenado del tren, los datos de la ruta (perfiles de gradientes, máxima velocidad, etc.), y la distancia objetivo (distancia que el tren puede recorrer sin detenerse).
Con estos datos, el sistema ATP del ordenador calcula continuamente la velocidad máxima permitida y se la muestra al conductor. Sila velocidad real deltrenno sobrepasa la máxima más un pequeño margen (5 km/h), el sistema no actúa.
De lo contrario, el sistema avisa al conductor mediante una señal, sonora o luminosa. Si el tren no frena, a partir de un margen mayor sobre la velocidad máxima calculada (8 km/h), el ordenador interviene sobre el equipo de frenado, el cual no podrá ser liberado hasta que la velocidad se sitúe por debajo delapermitida menos un pequeño margen. Si el conductor no libera entonces los frenos, éstos continuarán frenando el tren hasta que se detenga.
El intercambio de información puede ser por lazos de inducción, cable radiante, balizas, circuitos de vía codificados o radio.
Debido a la alta densidad de trenes en líneas de metro, se utiliza el "deslizamiento" de la señal, para evitar choques. Esto consiste en adelantar la señal al comienzo del cantón a una distancia equivalente a la distancia de frenado de seguridad. Aun así, por precaución es habitual utilizar un cantón sin ocupar como distancia de deslizamiento, sin necesidad entonces de mover las señales. Por lo general, el funcionamiento consiste en indicar al tren dos velocidades mediante laseñal: la máxima durante este trayecto y,la objetivo o velocidad máxima que se espera al salir del mismo. En caso de rebasarse la velocidad objetivo, cuando el tren llegue a ese punto será frenado automáticamente. Por ejemplo, una consigna transmitida podría ser "65/50". Esta consigna ordena al control del tren que si alcanza los 65 km/h (más un margen) a partir de ese momento deje de transmitir potencia. Habitualmente se fijan unos márgenes de velocidad, tanto superior {5%), para dejar de acelerar ligeramente por encima delavelocidad máxima, como inferior (8%), para marcar el momento en el que el motor vuelve a suministrar tracción al eje para acelerar. Esta conducción se mantiene durante todo el circuito de vía hasta que el sistema automático calcula, tomando en cuenta la curva de frenado del tren, que ha llegado el momento de frenar con el objetivo de cumplir la exigencia de velocidad ·a la salida", que en la consigna "65/50" sería 50 km/h.
Los sistemas ATP se dividen para los ferrocarriles urbanos metropolitanos, en cuatro categorías:
Sistemas puntuales de velocidad máxima.
Sistemas cantonales de velocidad máxima.
Sistemas de distancias objetivo.
Sistemas lineales o continuos.
Entre los sistemas puntuales de velocidad máxima sobresale el Sistema ASFA, el cual consiste en una baliza que se encuentra conectada con la señal y reproduce la indicación de ésta última. La antena situada en la parte inferior delantera del tren capta la información y la remite ala computadora dentro del tren, donde se analiza la información recibida y ésta la envía al tablero de control del conductor. Luego de unos instantes, si el conductor del tren no realiza las acciones pertinentes, la computadora pone en marcha las señales acústicas y vuelve a darle un margen de tiempo al conductor para que éste actúe. Si aún así este no responde (caso extremos de desmayo del chofer), la computadora emite la orden relativa al accionamiento de los frenos de emergencia y el tren frena.
En los sistemas cantonales de velocidad máxima (Figura >7), la premisa fundamental es que "sólo puede existir un tren en un determinado cantón a la vez"; aquí la información de cada c.v. se transmite codificada al tren que lo ocupa, basándose sus criterios de operación en que cada tren, según va ocupando nuevos cantones, recibe de estos la nueva velocidad máxima en dicho
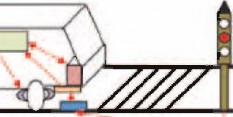
Figura 4. Sistema ASFA. Elaboración propia Figura
5. Tablero de control dentro del tren. Imagen cortesía CITEF. (Dr. Sanz-Bobi)
Figura 6. Movimiento de un tren en el sistemaASFA. Elaboración propia.
cantón y va dejando informaciones en el cantón que abandona; esto permite que los trenes sucesivos no puedan llegar a alcanzarle. Para dar cumplimento a lo anterior, el sistema de protección de trenes calcula las distancias de seguridad desde el inicio del cantón hacia atrás, con las consideraciones de: distancia de frenado de tren posterior con la mínima desaceleración de seguridad posible, distancia de recorrido delos tiempos muertos de operación de los sistemas de frenos, posible distancia de seguridad de deslizamiento con malas condiciones de adherencia rueda - carril y coeficientes de seguridad diversos.
El sistema de distancia objetivo se distingue del anterior en que cada tren conoce su posición y elcantón que ocupa el tren que le precede (no la posición dentro de dicho cantón). Esto permite que el cantón anterior al ocupado sea el cantón de freno, además de que los trenes puedan estar más cerca uno de otros y las velocidades medias sean más altas entre el trayecto interestació
Figura 7. Sistema cantonal de velocidad máxima (sistema de códigos de velocidad)
midiendo la distancia que aún le queda por recorrer a partir del punto, hasta un punto definido de seguridad X, el cual es anterior al circuito de vía ocupado una distancia dS.
3.3 Conducción ATO
Sistema de conducción automática en el que existe una comunicación entre elementos de la vía y elementos que viajan en el tren, pudiendo mandar señales al mismo que influyan o determinen su velocidad. Con este sistema todo queda automatizado, salvo las puertas del tren y la orden de arranque. El funcionamiento del sistema ATO es muy similar al ATP, pero en el ATO tanto la aceleración como la frenada habitualmente recaen en el sistema automático, haciéndolos más suaves y precisos y eliminando la necesidad de conductor, aunque éste se mantiene por la imposibilidad del sistema de resolver averías. Para una frenada precisa, por ejemplo en una estación, el ATO se comunica con el tren mediante balizas, la primera para indicarle que se aproxima un punto de frenado, y las siguientes para reposicionar el tren y recalcular la curva de frenado. Los códigos son los mismos a lo largo de la vía, del tipo "65/50". La regulación de la velocidad se consigue definiendo la velocidad de deriva, aquella a partir de la cual el tren deja de traccionar (el motor deja de suministrar par a los ejes) y va libre y por tanto frenándose. Este sistema permite mayor regularidad en la marcha y por ello mejorar tanto los tiempos de recorrido como la capacidad total de pasajeros transportados. Se hace imprescindible instalar el ATP ya que, cuando actúa el ATO el conductor pierde el control sobre el tren. La mayoría de los sistemas ATO permiten al conductor conducir manualmente, pero aun en esta situación el conductor no podrá sobrepasar la velocidad máxima fijada por el ATP.
3.4 Conducción ATC
La combinación de los sistemas ATP y ATO se denomina ATC (Automatic Train Control), el cual incluye tanto funciones automáticas como algunas que requieren intervención manual. Existen dos formas de implementar el ATC:
a) Bloqueo totalmente cantonado: la transmisión de datos al tren puede ser por circuitos de vía, lazos de control o balizas. Estos datos se traducen en comandos de aceleración, frenadas o mantenimiento de la velocidad.
b)Bloqueo móvil (Señalización basada en la Transmisión - TBS): la transmisión se realiza por radio. La posición del tren es determinada por un mapa a bordo, el cual se reinicia cuando el tren comienza el viaje y se verifica mediante balizas situadas a lo largo de la ruta. El área de cobertura del ATP es más grande. Si la transmisión por radio falla, éste asume que el tren que va por delante de él ha parado en su última posición conocida y parará a una distancia de seguridad por detrás de él.
3.5. Sistemas E.R.T.M.S.
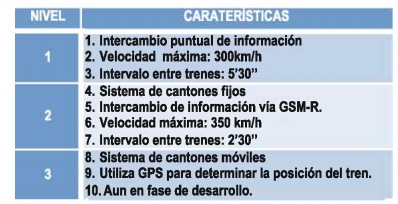
El sistema unificado de control de tráfico E.R.T.M.S. (European Railway Traffic Management System) está constituido por los subsistemas E.T.C.S. y GSM - R. Este sistema puede instalarse en tres versiones distintas: nivel 1, 2 y 3, de menos a más prestaciones en cuanto a seguridad, capacidad y velocidad.
Tabla 1.Características de los niveles E.R.T.M.S
3.6 Driverless
Se refieren a sistemas realmente sin conductor o totalmen automáticos. Debido a la eliminación de personal, se requiere u equipamiento mínimo para mantener la seguridad y la disponibilida en la conducción:
CCTV (Circuito Cerrado de Televisión) en estaciones y trenes
Puertas de andenes para evitar invasiones de la vía.
Comunicación bidireccional entre los trenes y el Puesto Centra
Transmisión de informaciones del estado del equipamiento d los trenes para monitorización y diagnosis.
En un gran número de sistemas de transporte sin conductor, lo trenes se diseñan para permitir que un operario conduzca los mismo en situaciones extraordinarias o ante incidencias. Los tableros d conducción deben ser invisibles e inaccesibles a los pasajeros.
3.7 C.T.C. (Centro de Control de Tráfico)
Su primera y principal misión es la Gestión del Tráfico de trene en las líneas, cocheras, depósitos y vías secundarias de form segura, cumpliendo los requerimientos del tráfico.
Desde el C.T.C. también se controla la calidad del servic ofertado mediante la regulación de los intervalos entre trene cumplimiento de horarios, realización de maniobras de encierres reposición de trenes en la línea y se resuelven todos los posible conflictos operacionales de la circulación de los trenes produciendo mínima perturbación al viajero. Además, y al mismo tiempo, el C.T.C genera valiosa información para los viajeros, como horas de llegad o posibles desviaciones de los horarios. Este sistema perrni también un ahorro energético seleccionando automáticament marchas de trenes más económicas.
Tabla 2. Resumen de los modos de conducción para los choferes de trenes.
Referencias
[1]F.J. González Femández, J.Fuentes Losa. lngenierfa Ferroviaria. Unidad Didáctica. ISBN 978-84-362-5293-4.2006.
[2]RENFE. Nociones básicas ferroviarias. Segunda Edición Escuela Técnica Profesional. Editorial Marcombo, S.A, Ediciones Técnicas. ISBN: 973-84-267-1513-5.2008.
[3]C. Zamorano, J.M. Bigas, Julián Sastre. Manual de Tranvlas, metros ligeros y sistemas en plataforma reservada. 2006. Diseno, proyecto, financiación e implantación. ISBN 84-86803-61-6.
[4]M. Melis, F. González. Ferrocarriles metropolitanos. Tranvías, metros ligeros y metros convencionales.ISBN B4-380-0287-0. 2002.
[5]Vuchic, Vurkan R. Urban Public Transportation.1981.
[6]A.>Berbey. >Planificación entiempo real de tráfico ferroviario. Tesis doctoral. Escuela Técnica Superior de Ingenieros Industriales. Universidad Politécnica de Madrid. >2008.
[7]Metro de Madrid. Normas de seguridad de los agentes en relación con la circulación. Metro de Madrid, SA Abril 1997. M-19634-1997.
[8] J. >D.Sanz-Bobi. Señalización ferroviaria. Introducción. CITEF. Páginas 30. 2009.